從設計到製造、Robot Teaching的一貫式生產、推廣製造現場的自動化‧省力化。聆聽客戶的期望或現狀後、再提出最適合製造line的整體系統。
 液晶玻璃基板 非接觸搬送系統 (Float Chuck Hand & C/V)
液晶玻璃基板 非接觸搬送系統 (Float Chuck Hand & C/V) 液晶玻璃基板 Dense Pack開梱‧梱包System
液晶玻璃基板 Dense Pack開梱‧梱包System
製品概要
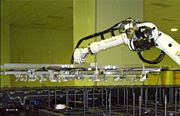 Float Chuck Hand
Float Chuck Hand
不會接觸到玻璃基板,利用AIR吸著後,在製造Line間移動。
 Floating C/V
Floating C/V
不會觸碰到玻璃基板,利用空氣將玻璃基板漂浮在C/V上搬送。
開發前問題點
- 液晶玻璃基板搬送裝置現狀是以Roller方式較為普及。Roller方式的問題點,如何使基板在洗淨後的檢查到梱包為止的Line上能夠無傷痕的搬送、提高出貨時的製品品質。
- 對應液晶玻璃基板的下世代規格(G8~G10)。
- 比起過往的非接觸搬送系統更能提升性能。(減少震動、浮力更高)
開發重點
非接觸Robot Hand是 利用Bernoulli的原理製造。利用AIR噴出時所產生的負壓來吸着基板。

- Float C/V比起過往的更能抑制脈動、實現低振動的搬送。
- 一邊維持高浮力、一邊抑制噴出AIR、達到節省能源的二全其美。
- Line間的基板移動為完全自動化。
- 進行大型化的設計,所以可以因應下世代基板的規格(G8~G10)。

-
- 刊登出來的製品圖片只是其中一例。在檢討既有設備如何提高版本時、對於使用的Robot廠商或規格等並沒有限制。
- 本公司的製品全都是詳細聆聽客戶製造Line的layout‧capacity‧製品概要‧人員配置等後,再依照期望來提案。

![]()

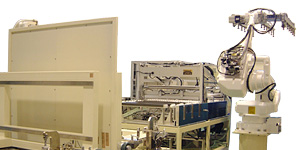
製品概要
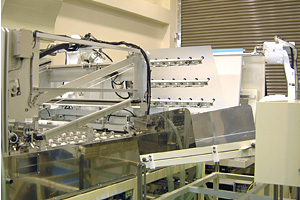 此系統是專門為液晶玻璃基板專用的搬送用棧板,自Dense Pack始的開梱、洗淨‧檢查後的捆包而製造的。可以在Dense Pack開始進行玻璃與合紙的取出及堆疊。可使用在液晶玻璃基板製造及液晶面板的二種製造Line。(開梱裝置:Dense Unpack、梱包裝置:Dense Pack)
此系統是專門為液晶玻璃基板專用的搬送用棧板,自Dense Pack始的開梱、洗淨‧檢查後的捆包而製造的。可以在Dense Pack開始進行玻璃與合紙的取出及堆疊。可使用在液晶玻璃基板製造及液晶面板的二種製造Line。(開梱裝置:Dense Unpack、梱包裝置:Dense Pack)
開發前問題點
- 需對應作業上的不規則。(修正Pitch的偏差)
- 提升產線效率(速度化、省力化)
- 對應液晶玻璃基板的下世代規格(G8~G10)。
開發重點
依據Robot Search的功能,可以自動算出最適合的Pitch。
- 在台灣Dense Pack開梱及系統上確保TOP share。(share 50%以上)
- 本公司裝置規格採用世界標準的規格。
- 擁有世界最快的處理能力。(G8尺寸:18秒/片、G5尺寸:10秒/片)
-
- 刊登出來的製品圖片只是其中一例。在檢討既有設備如何提高版本時,對於使用的Robot廠商或規格等並沒有限制。
- 本公司的製品全都是詳細聆聽客戶製造Line的layout‧capacity‧製品概要‧人員配置等後,再依照期望來提案。
![]()